Next:
2 アッテネータ
Up:
定インピーダンスアッテネータとフィルタ
Previous:
定インピーダンスアッテネータとフィルタ
1.1 Y-
変換
1.2
-Y変換
1 Y-
変換
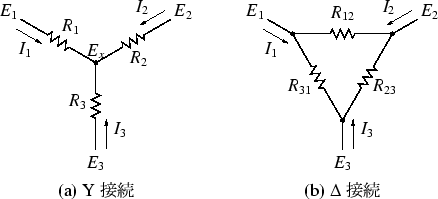
橋絡T型アッテネータやフィルタの解析に必要となるので, まず,Y-
変換の式を導きます.
1.1 Y-
変換
図 1:
Y接続と
接続
図
1
(a)より,
I
1
=
(1)
I
2
=
(2)
I
3
=
(3)
I
1
+
I
2
+
I
3
=
0
(4)
まず,
E
x
を求めます。 式(
1
), (
2
), (
3
)を 式(
4
)に代入して,
E
x
について解きます.
+
+
=
0
+
+
=
+
+
E
x
R
2
R
3
E
1
+
R
3
R
1
E
2
+
R
1
R
2
E
3
=
(
R
2
R
3
+
R
3
R
1
+
R
1
R
2
)
E
x
E
x
=
これを式(
1
)に代入して,
I
1
=
(
E
1
-
E
x
)
=
E
1
-
=
.
=
.
=
一方,図
1
(b)より,
I
1
=
+
(5)
I
2
=
+
(6)
I
3
=
+
(7)
であるから,
R
12
=
=
R
1
+
R
2
+
(8)
R
23
=
=
R
2
+
R
3
+
(9)
R
31
=
=
R
3
+
R
1
+
(10)
となります.
1.2
-Y変換
式(
8
), (
9
), (
10
)より,
R
12
R
3
=
R
23
R
1
=
R
31
R
2
=
R
1
R
2
+
R
2
R
3
+
R
3
R
1
R
x
(11)
これより,
R
1
=
(12)
R
2
=
(13)
R
3
=
(14)
これらを用いて, 式(
11
)の右側を書き直して,
R
x
について解きます.
R
x
=
+
+
1
=
R
x
=
これを, 式(
12
), (
13
), (
14
)に代入すると,
R
1
=
=
(15)
R
2
=
(16)
R
3
=
(17)
Next:
2 アッテネータ
Up:
定インピーダンスアッテネータとフィルタ
Previous:
定インピーダンスアッテネータとフィルタ
Ayumi Nakabayashi
平成19年7月1日
 +
+  +
+ 

 +
+ 
 +
+ 
 +
+ 
 +
+  +
+ 
 =
= 
 = R1 + R2 +
= R1 + R2 +  = R2 + R3 +
= R2 + R3 +  = R3 + R1 +
= R3 + R1 +