| Eg0 = - (尖頭許容入力電圧 +0.7) [V] | (2.39) |
増幅度については,この章でこれまで調べてきたような, 小信号解析の結果がそのままあてはまります.
大きな出力を取り出そうとすると, 電源電圧や真空管の非直線性などの制限を受けるようになり, 小信号解析の結果が常に得られるわけではありません. このような場合は, Ep-Ip 特性曲線を使って, 電源電圧,負荷抵抗,グリッドバイアスを慎重に決めていく必要があります.
まず三極管の場合を考えます. Eg = 0 の曲線とロードラインの交点により 最低プレート電圧 Ep min が決まりますが, 負荷抵抗を低くすると,Ep min が高くなり, 取り出せる出力が小さくなっていきます. 一方,負荷抵抗を高くすると,ロードラインが寝てきて, カットオフに近い特性曲線の湾曲部にかかることになり,直線性が悪くなります. また,出力インピーダンスも高くなり,高域特性が悪化します.
これらのことから,
RL![]() 2rp を目安にして
負荷抵抗を設定する場合が多いのです.
このとき,動作点のプレート電圧は
Ep = (2/3)Ebb,
最低プレート電圧は
Ep min
2rp を目安にして
負荷抵抗を設定する場合が多いのです.
このとき,動作点のプレート電圧は
Ep = (2/3)Ebb,
最低プレート電圧は
Ep min ![]() Ebb/3 程度になり,
実効値の出力電圧は
ep
Ebb/3 程度になり,
実効値の出力電圧は
ep ![]() Ebb/3
Ebb/3![]()
![]() Ebb/5
程度を見込めます.
ただし,実際には,グリッド電圧が低いところでは,特性曲線の間隔が詰まってきて,
所定の出力は得られません.
Ebb/5
程度を見込めます.
ただし,実際には,グリッド電圧が低いところでは,特性曲線の間隔が詰まってきて,
所定の出力は得られません.
ここで,12AU7 を使い,
Ebb = 250 V として設計してみます.
Ep = 80 V( ![]() Ebb/3), Eg = 0 の内部抵抗は
rp
Ebb/3), Eg = 0 の内部抵抗は
rp ![]() 7.3 kΩ なので,
負荷抵抗をその約3倍の
RL = 22 kΩ として
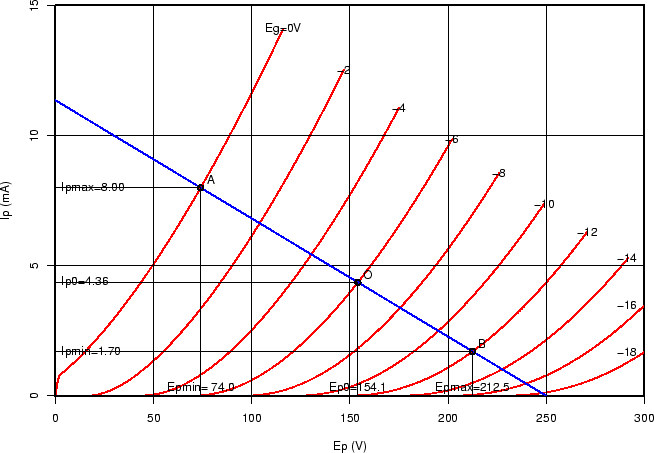
ロードラインを引いてみます(図2.18).
7.3 kΩ なので,
負荷抵抗をその約3倍の
RL = 22 kΩ として
ロードラインを引いてみます(図2.18).
この動作点のプレート電圧,プレート電流はそれぞれ Ep0 = 154.1 V, Ip0 = 4.36 mA で, +6 V の入力が加わったとき(点A), Ep min = 74.0 V, Ip max = 8.00 mA となり, -6 V の入力が加わったとき, Ep max = 212.5 V, Ip min = 1.70 mA となります. これより,出力は Ep max - Ep0 = 212.5 - 154.1 = 58.4 V から Ep min - Ep0 = 74.0 - 154.1 = - 80.1 V と 非対称になります. つまり,歪みが発生しています.
増幅度は (58.4 + 80.1)/2/6 = 11.54167 です. 小信号等価回路から増幅度を求めると, rp = 10.4295 kΩ, μ = 16.61322, A = 11.27032 となります.
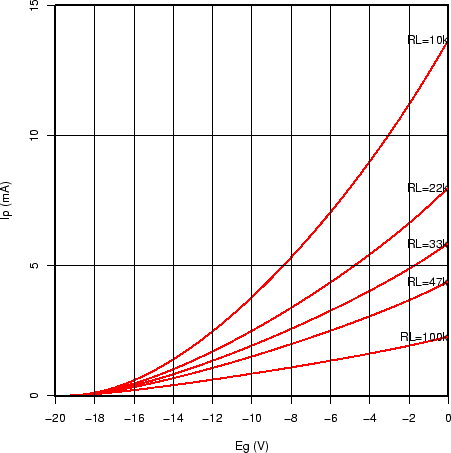
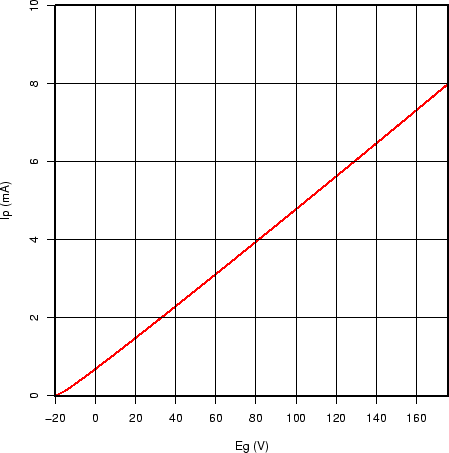
負荷抵抗がある回路について, 横軸に Eg をとり,縦軸に Ip をとったグラフが 動特性曲線で,この例の場合,図2.19のようになります.
さて,この動作点でよいとして,自己バイアスにするには, Ip0 = 4.36 mA, Eg0 = - 6 V より,
|
Rk = |
(2.40) |
これまでに説明した設計の方法は,Ep-Ip 特性図の上にロードラインを引いて, 特性曲線とロードラインの交点を求める必要があります. さまざまな負荷抵抗に対するロードラインを引くのも面倒ですし, グリッド電圧が離散的にしか与えられていないので, 特性曲線とロードラインの交点を目分量で読み取ることになります. 真空管の特性をモデル化してあれば, これらの作業をコンピュータにやらせることができるので, 手間がかかりません. また,FFTによる歪みの解析もできます.
まず最初に, カソード接地の伝達特性を計算するRの関数 trans.vol を作成します. この関数は,固定バイアスのカソード接地増幅回路の伝達特性 (ここではグリッド電圧とプレート電流やプレート電圧の関係)を計算するだけでなく, 電流帰還増幅回路およびカソードフォロワの伝達特性, 自己バイアスの動作点の決定にも使えるようにしてあります.
1 "trans.vol" <-
2 function(p, ei, Ebb, Eg0, Rp, Rk=0) {
3 # 電圧増幅の伝達関数を求める
4 # p: 真空管のパラメータ
5 # ei: 入力電圧
6 # Ebb: 電源電圧
7 # Eg0: グリッド電圧
8 # Rp: プレート側負荷抵抗
9 # Rk: カソード側負荷抵抗
10
11 RL <- Rp + Rk # 負荷抵抗
12 f <- function(ep) {
13 # ep: 対カソードプレート電圧
14 ip2 <- (Ebb - ep)/RL # ロードラインによる電流
15 ek <- ip2 * Rk # カソード電圧
16 ip1 <- Ip(p, ep, eg-ek) # プレート電圧に対するプレート電流
17 ip1 - ip2 # 差が0になるプレート電圧を求める
18 }
19 Eg <- ei + Eg0 # 実際のグリッド電圧(対アース)
20 ep <- rep(0, length(Eg))
21 for (i in seq(along=Eg)) { # 入力電圧の各要素に対してループ
22 eg <- Eg[i]
23 ep[i] <- if (Ip(p, Ebb, eg) == 0) Ebb # カットオフ
24 else uniroot(f, c(0, Ebb))$root
25 }
26 ip <- (Ebb - ep)/RL # プレート電流
27 ek <- ip * Rk # カソード電圧
28 eo <- ep + ek
29 list(Ip=ip, Eo=eo, Ep=ep, Ek=ek, Eg=Eg)
30 }
引数の説明は,3行目から9行目までにあるとおりです. Rk については,カソード接地の時に指定しなくてもよいように デフォルト引数 0 を指定してあります.
11行目では,トータルの負荷抵抗を求めています.
12行目から定義されている関数 f は, 特性曲線とロードラインの交点を求める時に使われるローカルな関数で, 解を求める関数 uniroot (24行目)によって使用されます. uniroot は,最初の引数で指定された関数の値が0になるような 引数の値を求める関数です. ここでは,f の引数が ep となっていますが, これは真空管のP-K間の電圧です. 関数 f は,P-K間電圧の候補 ep を受け取り, ロードラインから求めた電流と, このプレート電圧とグリッド電圧から計算されるプレート電流の差を求め返します. この値が0になれば,各部の電圧と電流が矛盾することなく定まったことになります.
関数の内部では,まず負荷抵抗にかかる電圧を求め, 流れる電流 ip2 を求めます. 次に,この電流が Rk を流れることにより発生するカソード電圧 ek を求めます. カソードの電圧が決まれば,G-K間の電圧(実際のグリッド電圧)が決まるので, プレート電流 ip1 が定まります. この ip1 と ip2 の差がこの関数の返値となります.
trans.vol では, ei にベクトルを指定することができるようになっています. こうすると, 複数のグリッド電圧に対するプレート電流などを1回で求めることができます. uniroot では複数の解(交点)を同時に求めることはできないので, 21行目からのループを使います. 23行目で交点を求めていますが, uniroot では解の探索範囲を指定する必要があります. プレート電圧は 0 と Ebb の間になるはずなので,この範囲を指定しています.
では,グリッド電圧を指定して,動作点のプレート電圧と電流を求めてみましょう.
> trans.vol(t12AU7, ei=0, Ebb=250, Eg=-6, Rp=22e3) $Ip [1] 0.00435906 # プレート電流 $Eo [1] 154.1007 # 出力ポイントの対アース電圧 $Ep [1] 154.1007 # 対カソードプレート電圧 $Ek [1] 0 # 対アースカソード電圧 $Eg [1] -6 # 対カソードグリッド電圧(引数の指定で ei= などとしてありますが, 引数の順序を正しく指定してやればこの部分を入力する必要はありません. ここでは引数の意味が分かりやすいように付けています. また,出力の空行を適宜除いてあります.zw)
ei にベクトルを指定すれば,一度にたくさんの点を求めることができます. ここでは,入力が +6 V, 0 V, -6 V の3つの場合について, プレート電流などを求めます.
> trans.vol(t12AU7, ei=c(6, 0, -6), Ebb=250, Eg=-6, Rp=22e3) $Ip [1] 0.007998548 0.004359060 0.001703476 $Eo [1] 74.03194 154.10068 212.52353 $Ep [1] 74.03194 154.10068 212.52353 $Ek [1] 0 0 0 $Eg [1] 0 -6 -12これで Ep min, Ip max 等が計算されました.
伝達特性(動特性)のグラフは次のようにして作成できます.
> Eg <- seq(-19, 0, by=0.5) > Eg [1] -19.0 -18.5 -18.0 -17.5 -17.0 -16.5 -16.0 -15.5 -15.0 -14.5 -14.0 -13.5 ... [37] -1.0 -0.5 0.0 > ip <- trans.vol(t12AU7, ei=0, Ebb=250, Eg=Eg, Rp=22e3)$Ip > ip [1] 1.689226e-05 5.087075e-05 1.032984e-04 1.727899e-04 2.577371e-04 ... [36] 6.957745e-03 7.295647e-03 7.645951e-03 7.998548e-03 > plot(Eg, ip, type="l")
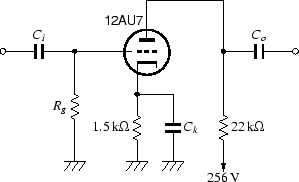
図2.20のバイアス電圧を求めます.
> trans.vol(t12AU7, ei=0, Ebb=256, Eg0=0, Rp=22e3, Rk=1.5e3)$Ek [1] 6.297733計算値より大きなカソード抵抗を用いたため, グリッドバイアスが少し深くなっています.
プレート接地増幅回路の場合も, カソード接地と同じように Ep-Ip 特性曲線にロードラインを引いて設計します. たとえば,第2.5.1節と同じ動作点により カソードフォロワを構成した場合, 図2.18の図をそのまま使えます.
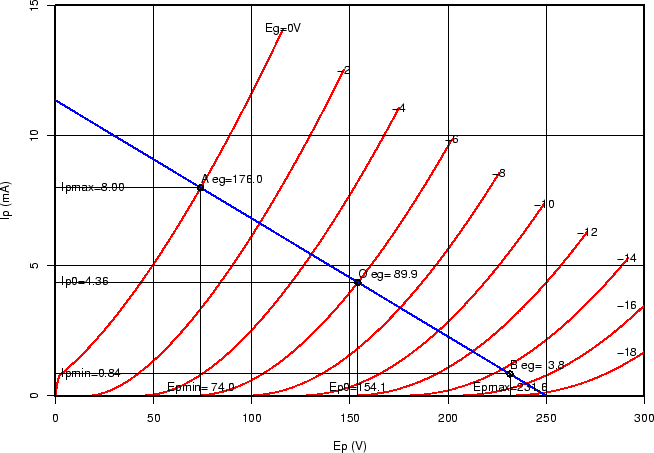
ここでは,グリッド抵抗をカソードにつなげない場合を考えます (グリッド抵抗を経由して現われる出力は一般に非常に小さいので 無視することにすれば, 他の形式のカソードフォロワにも使えます). カソードフォロワ用に点を取り直した特性曲線を 図2.21に示します.
動作点(点O)の対アースグリッド電圧は, Ebb - Ep0 + Eg0 = 250 - 154.1 - 6 = 89.9 V, 入力の正の尖頭値(Eg = 0 となる点A)の対アースグリッド電圧は, Ebb - Ep min = 250 - 74.0 = 176.0 V, それに対応する負の尖頭値(点B)の対アースグリッド電圧は, 89.9 - (176.0 - 89.9) = 3.8 V となります.伝達特性を求めるには,次のようにします.
> eg <- seq(3.8, 176, len=50) > ip <- trans.vol(t12AU7, ei=0, Ebb=250, Eg=eg, Rp=0, Rk=22e3)$Ip > ip [1] 0.0008365518 0.0009752263 0.0011147955 0.0012551109 0.0013960632 ... [46] 0.0073996938 0.0075497245 0.0076997719 0.0078498346 0.0079999121 > plot(eg, ip, type="l")図2.22のようなグラフが得られます. カソードフォロワは,真空管で得られるゲインをすべて負帰還しているため, このように直線性が非常に良くなります.
グリッド接地増幅回路を設計する場合も, 図2.18の特性曲線とロードラインを使います. ただし,グリッド接地の場合は,入力にともなって, 実質的な電源供給電圧が変動するため,図の読み取り方を変えなければなりません.
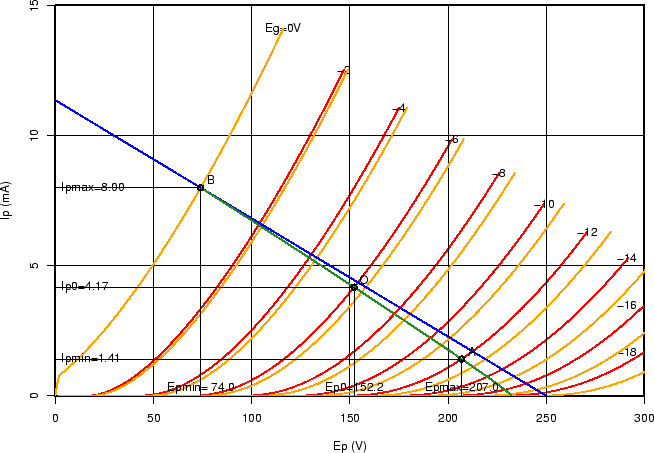
図2.23に, グリッド接地回路の特性曲線とロードラインを示します.
グリッド接地では, P-K間のプレート電圧と,カソード電圧(= - Eg)と,負荷抵抗の電圧降下を 足し合わせたものが電源電圧と等しくならなければなりません. そのため,入力に対応するグリッド電圧とロードラインの交点を求めるのではなく, 入力に対応するグリッド電圧の特性曲線を - Eg だけ右側に移動した 特性曲線とロードラインの交点を求めることになります. 図では,この移動した特性曲線をオレンジ色の線で示しています. 実際に真空管に掛かっているプレート電圧とプレート電流の関係は, カソード電圧の分だけ低く,図の緑色の線(B-O-A)のようになります.動作点では, 対カソードグリッド電圧は Eg0 = - 6 V で, この時のプレート電圧は Ep0 = 152.2 V, プレート電流は Ip0 = 4.17 mA です(点O). カソードに +6 V の信号が加わったとき, 対カソードグリッド電圧は Eg min = - 12 V となり, この時のプレート電圧は Ep max = 207.0 V, プレート電流は Ip min = 1.41 mA となります(点A). カソードに -6 V の信号が加わったとき, 対カソードグリッド電圧は Eg max = 0 V となり, この時のプレート電圧は Ep min = 74.0 V, プレート電流は Ip max = 8.00 mA となります(点B).
グリッド接地の伝達特性を求めるRの関数 trans.comg を以下に示します.
1 "trans.comg" <-
2 function(p, ei, Ebb, Eg0, Ek0, RL) {
3 # グリッド接地回路の伝達関数を求める
4 # p: 真空管のパラメータ
5 # ei: 入力電圧
6 # Ebb: 電源電圧
7 # Eg0: グリッド電圧
8 # Ek0: カソード電圧
9 # RL: 負荷抵抗
10
11 f <- function(ep) {
12 # ep: 対アースプレート電圧
13 ip2 <- (Ebb - ep)/RL # ロードラインによる電流
14 ip1 <- Ip(p, ep-ek, Eg0-ek) # プレート電圧に対するプレート電流
15 ip1 - ip2 # 差が0になるプレート電圧を求める
16 }
17 Ek <- ei + Ek0 # 実際のグリッド電圧(対アース)
18 ep <- rep(0, length(Ek))
19 for (i in seq(along=Ek)) { # 入力電圧の各要素に対してループ
20 ek <- Ek[i]
21 ep[i] <- if (Ip(p, Ebb-ek, Eg0-ek) == 0) Ebb # カットオフ
22 else uniroot(f, c(ek, Ebb))$root
23 }
24 ip <- (Ebb - ep)/RL # プレート電流
25 list(Ip=ip, Eo=ep, Ep=ep-Ek, Ip=ip, Ek=Ek)
26 }
特性曲線とロードラインの交点を求める際に,
特性曲線を平行移動する必要はなく,
プレート電圧をカソード電圧分だけ下げて計算すればよいのです(14行目).
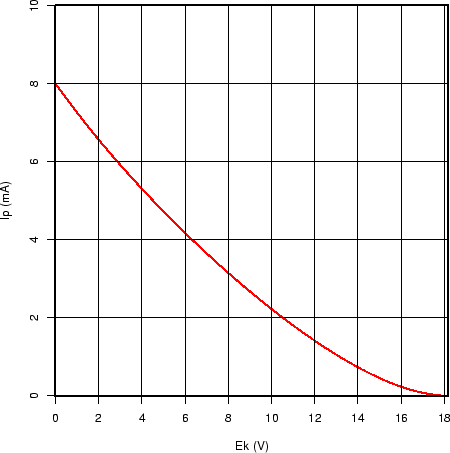
この関数を使って伝達特性を求めるには,次のようにします.
> ek <- seq(0, 12, by=0.5) > ip <- trans.comg(t12AU7, ei=0, Ebb=250, Eg0=0, Ek0=ek, 22e3)$Ip > ip [1] 0.007998548 0.007629136 0.007262160 0.006907778 0.006566853 0.006237492 ... [25] 0.001410539 > plot(ek, ip, type="l")図2.22のようなグラフが表示されます.