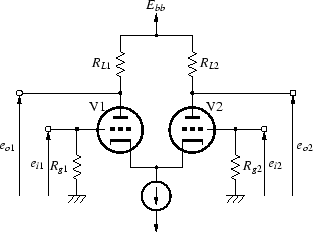
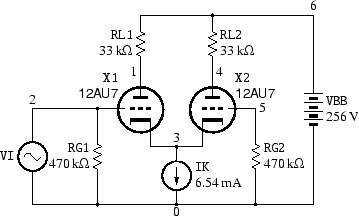
差動増幅回路は,2本の真空管のカソードを結び, そこに定電流源を接続して, 2本の真空管のプレート電流の和を常に一定に保つようにした回路です(図3.10).
プレート電流の和が一定ですから,片方の真空管のプレート電流が増えると, その分だけもう一方の真空管のプレート電流が減ります. 負荷抵抗が等しければ,正確に位相が反転した電圧がプレートに現われます. 差動増幅回路には,2つの入力があります. 出力には,2つの入力の差のみが現われます. 位相反転回路として使用する場合は,一方の入力のみを使い, 他方はアースするか,負帰還の入力として使用します.
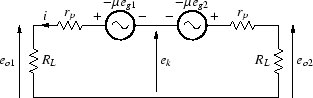
| eo1 | = | iRL | (3.17) |
| eo2 | = | - iRL | (3.18) |
| - μ(eg1 - eg2) | = | 2i(rp + RL) | (3.19) |
| ek | = | μeg1 + i(rp + RL) = μeg2 - i(rp + RL) | (3.20) |
| ei1 | = | eg1 + ek | (3.21) |
| ei2 | = | eg2 + ek | (3.22) |
| eg1 | = | ei1 - ek = ei1 - i(rp + RL) - μeg1 | |
| (1 + μ)eg1 | = | ei1 - (rp + RL)i | |
| eg1 | = |  |
|
| eg2 | = | ei2 - ek = ei2 + i(rp + RL) - μeg2 | |
| (1 + μ)eg2 | = | ei2 + (rp + RL)i | |
| eg2 | = |  |
|
| 2i(rp + RL) | = | - μ(eg1 - eg2) | |
| = | - |
||
| 2(rp + RL)i | = | - μ(ei1 - ei2) | |
| i | = |  |
|
| eo1 | = | iRL = - μ(ei1 - ei2) |
(3.23) |
| ek | = | i(rp + RL) + μeg1 = (rp + RL)i + μ |
|
| = |  |
||
| = |  = =  |
||
| = | (3.24) |
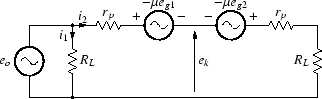
| i1 | = | (3.25) | |
| eo + μ(eg1 - eg2) | = | i2(2rp + RL) | (3.26) |
| eg1 | = | eg2 = - ek | (3.27) |
| i2 | = | ||
| Zo | = |  |
|
| = | RL//(2rp + RL) |
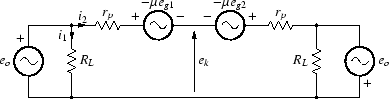
また,両方の出力の条件が等しい場合の出力インピーダンスを求めるための 等価回路は図3.13のようになります. 等価回路より,
| i1 | = | (3.28) | |
| 2eo + μ(eg1 - eg2) | = | 2i2rp | (3.29) |
| eg1 | = | eg2 | (3.30) |
| i2 | = | ||
| Z'o | = |
| | A| | = | 16.32624 = 6.018942 = 6.018942 |
|
| Zo | = | 33//(2 x 11.75587 + 33) = 20.834 [kΩ] | |
| Z'o | = | 33//11.75587 = 8.667995 [kΩ] |
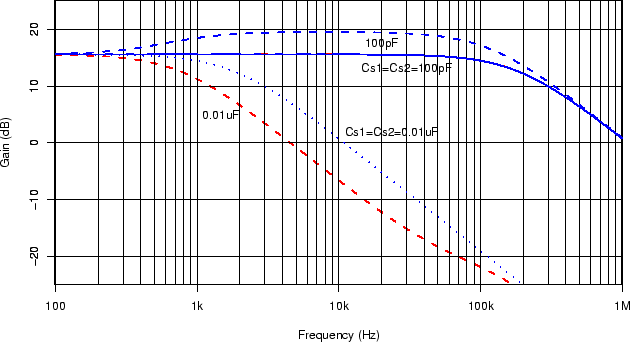
図3.14に, V1およびV2のプレートとアース間に 100 pF または 0.01 μF を 付加した場合の周波数特性を示します. 赤い線がV1側のゲイン, 青い線がV2側のゲインを表わしています. 実線は,V1,V2とも 100 pF を付加した場合, 破線は,V1に 0.01 μF, V2に 100 pF を付加した場合, 点線は,V1,V2とも 0.01 μF を付加した場合です. 0.01 μF を付加した場合のカットオフ周波数は,
 =
=  = 1836.122 [Hz]
= 1836.122 [Hz]
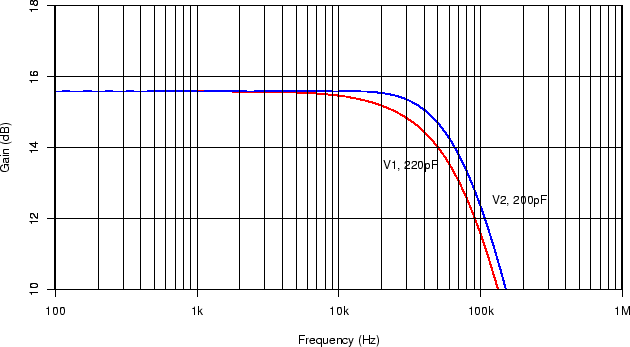
V1側に 220 pF, V2側に 200 pF を付加した場合の 周波数特性は図3.7のようになります. V1とV2で多少形が異なりますが, P-K分割回路と比べると素直な落ち方になっています.
1 Differential amplifier with 12AU7
2 .INCLUDE 12AU7.lib
3 X1 1 2 3 12AU7
4 X2 4 5 3 12AU7
5 IK 3 0 6.53632mA
6 RL1 6 1 33k
7 RL2 6 4 33k
8 RG1 2 0 470k
9 RG2 5 0 470k
10 VI 2 0 DC 0V AC 1V
11 VBB 6 0 256V
12 .control
13 op
14 print v(1) v(3) v(1,3) v(2,3) v(4,3) v(5,3) i(vbb)
15 tf v(1) vi
16 print all
17 tf v(4) vi
18 print all
19 ac dec 1 1k 1k
20 print v(2) v(3)
21 .endc
22 .END
1
2 Circuit: Differential amplifier with 12AU7
3
4 v(1) = 1.481507e+02
5 v(3) = 6.005662e+00
6 v(1,3) = 1.421451e+02
7 v(2,3) = -6.00566e+00
8 v(4,3) = 1.421451e+02
9 v(5,3) = -6.00566e+00
10 i(vbb) = -6.53632e-03
11 transfer_function = -6.01894e+00
12 output_impedance_at_v(1) = 2.083400e+04
13 vi#input_impedance = 4.700000e+05
14 transfer_function = 6.018939e+00
15 output_impedance_at_v(4) = 2.083400e+04
16 vi#input_impedance = 4.700000e+05
17 v(2) = 1.000000e+00,0.000000e+00
18 v(3) = 4.716081e-01,1.373463e-02
差動増幅回路は,動特性曲線の非直線性を打ち消すようにカソード電圧が変化するので, プレート電流が変化する範囲はカソード接地回路よりも狭くなります.
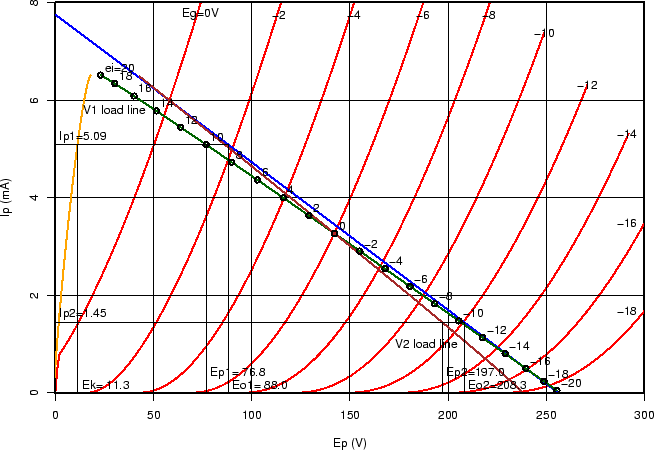
差動増幅回路による位相反転のロードラインは, 図3.17のようになります. 青い線が負荷抵抗 33 kΩ によるロードラインで, x 軸との交点は Ebb = 256 V にとってあるので, 各球の対アースプレート電圧を表わします. V1のロードラインは緑色の線(丸印がついている曲線)で, V2のロードラインは茶色の線です. V1のプレート電流とカソード電圧の関係は,オレンジ色の線で表わされています.
例えば ei = 10 V の入力があった場合, カソード電圧は Ek = 11.3 V となり, V1のグリッド電圧は Eg1 = 10 - 11.3 = - 1.3 V となって, プレート電流が Ip1 = 5.09 mA 流れます. このときのプレート電圧は Ep1 = 76.8 V で, 対アースプレート電圧は Eo1 = 88.0 V になります. V2のグリッド電圧は Eg2 = 0 - 11.3 = - 11.3 V となって, プレート電流が Ip2 = 1.45 mA 流れます. このときのプレート電圧は Ep2 = 197.0 V で, 対アースプレート電圧は Eo2 = 208.3 V になります. プレート電流の合計は 5.09 + 1.45 = 6.54 mA となって, 設定したカソード電流と確かに一致しています.
また,V1のロードラインと Eg = 0 の交点は,約 13.35 V なので, 尖頭値で 13.35 V までの入力を加えることができます.
伝達特性のグラフは,以下に示すRの関数 trans.diff を使用して作成できます.
1 "trans.diff" <-
2 function(p, ei1, ei2=0, Ebb, Eg0,
3 RL1, RL2=RL1, aRL1=RL1, aRL2=RL2, Ik, Rk)
4 {
5 # 差動増幅回路の伝達関数
6 # p: パラメータ
7 # eg: 入力電圧
8 # Ebb: 電源電圧
9 # Eg0: グリッド電圧
10 # RL1: V1負荷抵抗(DC)
11 # RL2: V2負荷抵抗(DC)
12 # aRL1: V1負荷抵抗(AC)
13 # aRL2: V2負荷抵抗(AC)
14 # Ik: 共通カソード電流
15 # Rk: カソード抵抗
16
17 # check parameter
18 if (missing(Ik) && missing(Rk))
19 stop("Ik or Rk must be specified.")
20 if (missing(Ik))
21 mode <- 1 # mullard
22 else
23 mode <- 0 # diff
24
25 if (length(ei1) != length(ei2)) {
26 ei1 <- ei1 + ei2 * 0
27 ei2 <- ei2 + ei1 * 0
28 }
29
30 get.ep.dc <- function(eg, ek, RL) {
31 ip <- Ip(p, Ebb-ek, eg-ek)
32 if (ip <= 0 || RL <= 0)
33 return(list(ep=Ebb, ip=ip))
34 ep <- uniroot(function(ep) {
35 ip2 <- (Ebb - ep) / RL
36 ip1 <- Ip(p, ep-ek, eg-ek)
37 ip1 - ip2
38 }, c(ek, Ebb))$root
39 list(ep=ep, ip=(Ebb-ep)/RL)
40 }
41
42 get.ep.ac <- function(eg, ek, RL) {
43 Epmax <- Ep0 + Ip0 * RL
44 ip <- Ip(p, Epmax-ek, eg-ek)
45 if (ip <= 0 || RL <= 0)
46 return(list(ep=Ebb, ip=ip))
47 ep <- uniroot(function(ep) {
48 ip2 <- Ip0 + (Ep0 - ep) / RL
49 ip1 <- Ip(p, ep-ek, eg-ek)
50 ip1 - ip2
51 }, c(ek, Epmax))$root
52 list(ep=ep, ip=Ip0+(Ep0-ep)/RL)
53 }
54
55 f.dc <- function(ek) {
56 if (mode == 1)
57 ip <- ek / Rk
58 else
59 ip <- Ik
60 v1 <- get.ep.dc(Eg0+eg1, ek, RL1)
61 v2 <- get.ep.dc(Eg0+eg2, ek, RL2)
62 v1$ip + v2$ip - ip
63 }
64
65 f.ac <- function(ek) {
66 if (mode == 1)
67 ip <- ek / Rk
68 else
69 ip <- Ik
70 v1 <- get.ep.ac(Eg0+eg1, ek, aRL1)
71 v2 <- get.ep.ac(Eg0+eg2, ek, aRL2)
72 v1$ip + v2$ip - ip
73 }
74
75 if (mode == 1)
76 ekmax <- Ebb * Rk / (Rk + RL1%p%RL2)
77 else
78 ekmax <- Ebb - Ik * min(c(RL1, RL2))
79 cat("ekmax=", ekmax, "\n", sep="")
80 eg1 <- eg2 <- 0
81 ek0 <- uniroot(f.dc, c(Eg0, ekmax), tol=1e-8)$root
82 cat("ek0=", ek0, "\n", sep="")
83 v1 <- get.ep.dc(Eg0, ek0, RL1)
84 Ep0 <- v1$ep
85 Ip0 <- v1$ip
86 cat("Ep0=", Ep0, ", Ip0=", Ip0, "\n", sep="")
87
88 ek <- ip1 <- ip2 <- eo1 <- eo2 <- rep(NA, length(ei1))
89 for (i in seq(along=ei1)) {
90 cat(i, "")
91 eg1 <- ei1[i]
92 eg2 <- ei2[i]
93 ek[i] <- uniroot(f.ac, c(min(c(eg1, eg2))+Eg0, ekmax), tol=1e-8)$root
94 v1 <- get.ep.ac(Eg0+eg1, ek[i], aRL1)
95 ip1[i] <- v1$ip
96 eo1[i] <- v1$ep
97 v2 <- get.ep.ac(Eg0+eg2, ek[i], aRL2)
98 ip2[i] <- v2$ip
99 eo2[i] <- v2$ep
100 }
101 cat("\n")
102 list(ek=ek, eo1=eo1, eo2=eo2, ip1=ip1, ep1=eo1-ek, ip2=ip2, ep2=eo2-ek)
103 }
trans.diff は,差動増幅回路およびカソード結合型位相反転回路の
伝達特性を計算する関数です.
差動増幅出力段にも使えるように,
直流の負荷と交流の負荷として別々の値を指定することができます.
Ik または Rk のいずれか一方を指定します. Ik を指定した場合は差動増幅回路になり, 値には共通カソード電流を指定します. Rk を指定した場合はカソード結合型位相反転回路になり, 値には共通カソード抵抗を指定します.
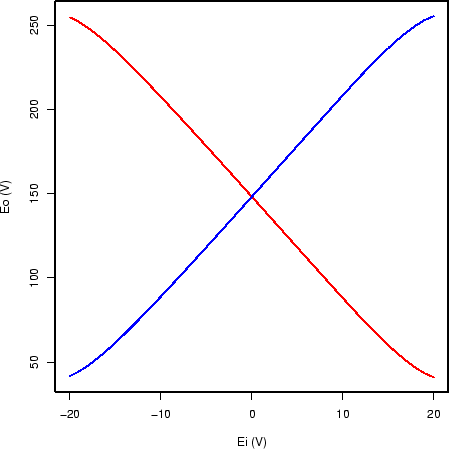
> Ei <- seq(-20, 20, by=1) > z <- trans.diff(t12AU7, ei1=Ei, Ebb=256, Eg=0, RL1=33e3, Ik=6.53632e-3) > matplot(Ei, cbind(z$eo1, z$eo2), type="l", lty=1)図3.18のようなグラフが描かれます.